Mechanical movement of motion relativity, reference system, material point, trajectory. Path and movement. Instant speed. Acceleration. Uniform and equivalent movement
Answer Plan
1. Definition of mechanical movement. 2. Basic concepts of mechanics. 3. Kinematic characteristics. 4. Basic equations. 5. Types of movement. 6. Motion relativity.
Mechanical The movement is called the change in the position of the body (or its parts) relative to other bodies. For example, a person traveling on an escalator in the subway is in peace about the escalator itself and moves relative to the walls of the tunnel; Mount Elbrus is alone relative to the Earth and moves together with the Earth regarding the Sun.
From these examples, it is clear that you should always specify the body relative to which the movement is considered, it is called body reference. The coordinate system, the reference body with which it is connected, and the selected method of measuring time form reference system. Consider two examples. The size of the orbital station, which is in orbit near the ground, can not be taken into account, calculating the path of movement of the spacecraft during docking with the station, without taking into account its size is not to do. Thus, sometimes body sizes compared to the distance to it can be neglected, in these cases the body is considered a material point, a line, along which the material point is moving, called the trajectory. The length of the part of the trajectory between the initial and end position is called the path (L). The unit of measurement is 1m.
Mechanical movement is characterized by three physical quantities: moving, speed and acceleration.
Direct segment direct, conducted from the initial position of the moving point in its final position, is called movement (s), Movement - the magnitude of the vector unit of measurement of moving-1m.
Speed - Vector physical quantity characterizing the speed of body movement, numerically equal to the ratio of movement over a small period of time to the magnitude of this gap. The gap, time is considered small enough if the speed has not changed during this gap. For example, when moving the car T ~ 1 C, when driving an elementary particle T ~ 10 s, when driving celestial tel T ~ 10 s. The determining speed formula has the form v. \u003d S. / t. Speed \u200b\u200bmeasurement unit - m / s. In practice, use a unit of measuring the speed of the KM / H (36 km / h \u003d 10 m / s). Measure speed speedometer.
Acceleration - Vector physical quantity characterizing the speed of changing the speed, numerically equal to the ratio of a change in speed by a period of time during which this change occurred. If the speed changes the same during the entire movement time, the acceleration can be calculated by the formula but \u003d (V. - V 0) / t. Unit of measurement of acceleration - m / s 2.
The characteristics of the mechanical movement are related to the main kinematic equations.
s \u003d. v 0 T + AT 2/2;
v \u003d V 0 + AT.
Suppose that the body is moving without acceleration (the aircraft on the route), its speed is not changed for a long time, but \u003d 0, then the kinematic equations will look at: v. \u003d const, s \u003d vt. .
Movement at which the body speed does not change, i.e. the body for any equal intervals moves to the same value, called uniform straightforward movement.
During the start, the speed of the rocket increases rapidly, i.e. acceleration a\u003e oh, and \u003d\u003d const.
In this case, the kinematic equations look like this: v \u003d V 0 + AT, S = V 0 T + AT 2/2.
With this movement, the speed and acceleration have the same directions, and the speed changes the same in any equal intervals. This type of movement is called equal asked.
When braking the car, the speed decreases equally for any equal intervals, acceleration is less than zero; Since the speed decreases, the equations take the form :v. = v 0 + AT, S \u003d V 0 T - AT 2/2 . Such a movement is called equifiable.
All physical quantities characterizing the movement of the body (speed, acceleration, movement), as well as the type of trajectory, can change when moving from one system to another, i.e. the nature of the motion depends on the selection of the reference system, and manifests itself the relativity of movement. For example, in the air there is a refueling aircraft. In the reference system associated with the aircraft, another aircraft is located alone, and in the land-related reference system, both aircraft are in motion. When the cyclist is moving, the wheel point in the reference system associated with the axis has the trajectory shown in Figure 1.
Fig. 1 Fig. 2.
In the reference system associated with the Earth, the view of the trajectory is different (Fig. 2).
Ticket number 3.
Interaction tel. Force. Newton laws
Law. There are such reference systems, called inertial, relative to which progressively moving bodies retain their speed constant if other bodies do not act on them.
Law. In the interaction of bodies there are forces equal in size opposite to the direction directed along one straight line, the same in nature and attached to different bodies.
Answer Plan
Interaction tel. 2. Types of interaction. 3. force. 4. Forces in mechanics.
| |

Simple observations and experiments, such as carts (Fig. 3), lead to the following qualitative conclusions: a) the body for which other bodies do not act, retains its speed unchanged;
b) the acceleration of the body occurs under the action of other bodies, but depends on the body itself; c) the actions of the bodies each other always worry the nature of the interaction. These findings are confirmed by observing phenomena in nature, technique, outer space only in inertial reference systems.
The interactions differ from each other and quantitatively, and qualitatively. For example, it is clear that the more the spring is deformed, the greater the interaction of its turns. Or, the closer the two charges of the same name, the stronger they will attract. In the simplest cases, the interaction of quantitative characteristic is power. Strength is the reason for the acceleration of bodies in relation to the inertial reference system or their deformation. Power is
vector physical quantity, which is a measure of acceleration purchased by bodies when interacting. The force is characterized by: a) module; b) point of application; c) direction.
Unit of measurement of force - Newton. 1 Newton is a force that body weighing 1 kg reports the acceleration of 1 m / s in the direction of this force if other bodies do not act on it. The resulting multiple forces call the power, the action of which is equivalent to the action of the forces that it replaces. Equality is a vector sum of all forces attached to the body.
R \u003d F1 + F2 + ... + Fn ,.
Qualitatively in its properties of interaction is also different. For example, electrical and magnetic interactions are associated with the presence of charges in particles or with the movement of charged particles. Most just to calculate power in electrodynamics: ampere power - F \u003d ilbsina, Lorentz power - F \u003d qv bsin a., Coulomb force - F \u003d Q 1 Q 2 / R 2; and gravitational forces: the law of global F \u003d GM 1 m 2 / R 2. Such mechanical forces as
the force of elasticity and the force of friction arise as a result of electromagnetic interaction. For their calculation, it is necessary to use formulas: .fynp \u003d - kX.(law throat), ftr \u003d Mn - friction force.
Based on experienced data, Newton's laws were formulated. The second law of Newton. The acceleration with which the body moves is directly proportional to the resultant all forces acting on the body, inversely proportional to its mass and is directed in the same way as the equal force: a = F / m.
To solve problems, the law is often recorded in the form: F \u003d TA.
Ticket4.
Body impetus. The law of preserving the impulse in nature and technology
Answer Plan
1. Body impetus. 2. The law of preserving the impulse. 3. Application of the law of preserving the impulse. 4. Reactive movement.
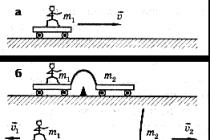
Simple observations and experiments prove that peace and movement are relative, the body speed depends on the selection of the reference system; According to Newton's second law, regardless of whether the body was alone or moved, the change in the speed of its movement can occur only under the action of force, i.e., as a result of interaction with other bodies. However, there are values \u200b\u200bthat can persist in the interaction of tel. Such values \u200b\u200bare energy and pulse.
Pulse Body Call a vector physical quantity that is a quantitative characteristic of progressive movement of tel. The impulse is designated r. Unit of impulse measurement R - kg m / s. The body pulse is equal to the product of body weight at its speed: p \u003d mv. Pulse vector direction r Coincides with the direction of body velocity vector v. (Fig. 4).

|

For a pulse of bodies, the law of preservation is performed, which is valid only for closed physical systems. In the general case, a closed is called a system that does not exchange energy and mass with bodies and fields that are not included in it. In mechanics closed They call the system to which the external forces or the effect of these forces are compensated. In this case p 1 \u003d p 2 Where p 1 - initial impetus system, and p 2 - finite. In the case of two bodies that are in the system, this expression has the form M 1 V 1 + t 2 V 2 = m 1 V 1 "+ T 2 V 2" Where t 1 and t 2 - Mass bodies, and V 1 and V 2, - speeds up to interaction, V 1 "IV 2" - Speed \u200b\u200bafter interaction. This formula is the mathematical expression of the impulse conservation law: the impulse of a closed physical system is maintained in any interactions occurring within this system.
In other words: in a closed physical system, the geometric sum of the pulses of bodies to the interaction is equal to the geometric sum of the pulses of these bodies after interaction. In the case of an open system, the power pulse system is not saved. However, if there is a direction in the system, according to which the external forces do not act or their action is compensated, then the projection of the pulse is preserved to this direction. In addition, if the interaction time is not enough (shot, explosion, blow), then during this time, even in the case of an open system, external forces slightly change the impulses of interacting tel. Therefore, for practical calculations, in this case, the law of preserving the pulse can also be applied.
Experimental studies of interactions of various bodies - from planets and stars to atoms and elementary particles - showed that in any system of interacting bodies in the absence of action from other bodies that are not included in the system or equality zero amounts of existing forces, the geometric sum of the pulses of the bodies really remains unchanged .
In the mechanics, the law of preserving the impulse and the laws of Newton are related to each other. If on the body mass t. for a time t. There is a force and the speed of its movement varies from v 0 to V. , then speeding movement a. Body equals a. \u003d (V - v 0) / t. Based on the second law Newton for strength F. can be recorded F \u003d TA = m (V - V 0) / T, Hence the FT \u003d MV - MV 0.
Ft - Vector physical quantity that characterizes the action on the body of force for a certain period of time and equal to the work of force at the time t. its actions called pulse force.
Unit of impulse in si - n s.
The law of preserving the impulse underlies the reactive movement. Jet propulsion - It is the movement of the body that arises after separation from the body of its part.
Let the body mass t. rested. From the body some part of it separated t 1 at V. 1 . Then
the remaining part will move in the opposite direction at the speed V 2 , Mass of the remainder t 2. Indeed, the sum of the pulses of both parts of the body to separation was zero and after separation will be zero:
t 1 v 1 + m 2 v 2 \u003d 0, hence V 1 \u003d -m 2 V 2 / m 1.
The great merit in the development of the theory of reactive movement belongs to K. E. Tsiolkovsky.
He developed the theory of the flight of the variable mass (rocket) body in a homogeneous field of gravity and calculated the stocks of the fuel required to overcome the power of the earth's attraction; Basics of the theory of the liquid reactive motor, as well as the elements of its design; The theory of multi-stage missiles, and suggested two options: parallel (several jet engines work at the same time) and serial (reactive engines work each other). K. E. Tsiolkovsky strictly scientifically proved the possibility of flying into space using rockets with a liquid jet engine, proposed special trajectories of planting spacecraft to Earth, put forward the idea of \u200b\u200bcreating interplanetary orbital stations and examined in detail the living conditions and livelihoods on them. The technical ideas of Tsiolkovsky are applied when creating modern rocket and space technology. Movement with a reactive jet, according to the law of preserving the pulse, underlies the hydroreactive engine. At the heart of the movement of many marine mollusks (octopuses, jellyfish, squid, Karakatits) also lies the reactant.
Definition 1.
Interaction in physics is the effect of particles or bodies on each other, leading to a change in the state of their movement.
Changing the state of bodies in space
Despite the variety of influences of bodies on each other, there are only four types of fundamental influences in nature:
- gravitational;
- weak interactions;
- strong interactions;
- electromagnetic interactions.
Any changes in nature occur as a result of interaction between bodies. To change the position of the carriage on the rails, the railway workers send a locomotive to it, which shifts the wagon from the place and leads it to the state of movement. A sailboat can stand at the shore for a long time until there will be a passing wind that will affect his sails. The wheels of the toy car can rotate at any speed, but the toy will not change its position if it does not put a plank or ruler under it. The shape or size of the spring can be changed, just joining it loaded or pulling her hand for one of its ends.
All bodies in nature act alone on another or directly through the physical fields. If the diesel locomotive acts on the car and changes its speed, then the speed of the diesel engine is also changing as a result of the return of the car. The sun acts on Earth and Body, holding it in orbit. But the Earth attracts the sun, and in turn changes its trajectory. So, in all cases, it is possible to talk only about mutual effects of the body - interaction.
When interacting, the velocities of bodies or their parts are changed. On the other hand, interacting with different bodies, it will change its speed in different ways. So, a sailboat can acquire speeds due to the actions of the wind. But the same result can be achieved by turning on the engine located on the sailboat. It can be shifted from the place and the boat acting on the sailboat through the cable. In order not to call every time all the interacting bodies, or the bodies that act on this, all these actions combine one concept of force.
What is power?
The force, perceiving it as a physical concept may be greater or less, as well as given the changes caused by it in a state of the body or its parts.
Definition 2.
Power is a physical quantity that is characterized as the action of one body to another.
The action of the heat carrier to the car will be significantly more intense than the action of several loaders. Under the action of a diesel engine, the car will move faster and starts to move with a greater speed than when the wagon will push movers that slightly shift the car or does not move away from the place at all.
In order to produce mathematical calculations, the force is denoted by the Latin letter $ F $.
Like all other physical quantities, strength has certain units. Nowadays, science enjoys a unit called Newton ($ H $). She received such a name in honor of the scientist Isaac Newton, which made a significant contribution to the development of physical and mathematical science.
I. Newton is an outstanding English scientist, founder of classical physics. His scientific works relate to mechanics, optics, astronomy and mathematics. He formulated the laws of classical mechanics, opened the dispersion of light, developed differential and integral calculations, etc.
Measuring force
For measurement of force, special devices are used, which are called dynamometers. It is worth noting that the numeric value of force is not always enough to determine its data. You need to know the point of its application and the direction of action.
If the high bar, which is standing on the table, push at the bottom, then it will slide on the surface of the table. If you make strength to it in the upper part of it, then it is just a tip.
It is clear that the direction of falling the bar depends on the direction to push it. So strength is also a direction. From the direction of force depends on the change in body velocity, which this force acts.
Using the graphic method, you can conduct various mathematical operations with forces. So, in one point on the body, the attached forces $ 2h $ and $ ch $ act in one direction, then their action can be replaced by one force that works in the same direction, and its value is equal to the sum of the values \u200b\u200bof each of the forces. The vector of this force has a length that is equal to the sum of the lengths of both vectors.
The resulting force is the force whose action is equally valid for several forces applied to the body at a specific point.
Another case is possible when the forces attached at one point are valid in opposite directly. In this case, they can be replaced by one force moving towards the greater force, and its value equals the difference of values \u200b\u200bof each force. The length of this force vector is equal to the difference between the length of the vectors of the attached strength.
Inertia is a phenomenon of preserving constant speeds when other bodies do not act on them. This phenomenon is that a certain time is required to change body velocity. Inertia can not be measured, it can only be observed, or reproduced.
Note that on earthly conditions it is impossible to create circumstances in which the forces do not act on the body, because there is always earthly attraction, the power of resistance is motor and the like. The inertia phenomenon opened the well-known scientist Galileo Galilee. It is noted that various scales are used for direct measurement. Among them are the most common and simplest - lever. On these scales compare the interaction with the ground of the body and the reference weights assigned to the scale of the scales. In practice, other scales that are adapted to various working conditions and have different designs. In this case, the accuracy of mass measurement is of great importance.
The classic mechanics believes that:
a) The mass of the material point does not depend on the status of the movement of the point, being its unchanged characteristic.
b) Mass - the value is additive, i.e. The mass of the system (for example, body) is equal to the sum of the mass of milestones of material points that are part of this system.
c) the mass of a closed system remains unchanged with any processes occurring in this system (the law of preserving the mass).
Density ρ Body at this point M. called the ratio of mass dM. Small body element including point M., To magnitude dV Volume of this element:
The dimensions of the element under consideration should be so small so that a change in density within its limits could be many times more intermolecular distances.
The body is called uniform If in all its points the density is the same. The mass of a homogeneous body is equal to the product of its density to the volume:
Weight of heterogeneous body:
DV,where ρ is the function of coordinates, and the integration is carried out throughout the volume of the body. Medium density (ρ) The inhomogeneous body is called the ratio of its mass to volume: (ρ) \u003d m / v.
Center Mass System material points called point C, radius-vector
which is: and - mass and radius-vector i."The material point, n is the total number of material points in the system, and M \u003d - the mass of the entire system.Mass center speed:
Vector magnitude
equal to the product of the mass of the material point at its speed, called impulse or number of movement , this material point. Impulse system material points called vector p.equal to the geometric sum of pulses of all material points of the system:the pulse of the system is equal to the mass of the entire system on the speed of the center of its masses:
Second Newton Law
The basic law of the dynamics of the material point is the second law of Newton, which indicates how the mechanical movement of the material point under the action of the forces attached to it. Second Newton Law Person: Pulse Change Speed ρ material point is equal to acting on it F..
, orwhere M and V are the mass and speed of the material point.
If there are several strength on the material point at the same time, then under force F. In the second law of Newton, it is necessary to understand the geometric sum of all current forces - both active and reactions of connections, i.e. Incoming force.
Vector magnitude F.dt.called elementary impulse forces F. For a little time dt. Her actions. Power pulse F. per terminal time from
Up to equal to a specific integral:where F., in general, depends on time t..
According to Newton's second law, the change in the pulse of the material point is equal to the impulse of the current forces:
d.p \u003d F. dt.and
- The value of the pulse of the material point at the end () and at the beginning () of the time period under consideration.Since in Newtonian mechanics mass m.material point does not depend on the status of the point of the point, then
Therefore, the mathematical expression of the Second Law of Newton can also be submitted in the form
- acceleration of the material point, r. - Its radius-vector. Accordingly, the wording second law Newton It says: the acceleration of the material point coincides in the direction of the force acting on it and equals the attitude of this force to the mass of the material point.The tangent and normal acceleration of material are determined by the corresponding components of the force F.
- module of the velocity vector of the material point, and R. - The radius of the curvature of its trajectory. The force reporting the material point is normal acceleration, aimed to the center of the curvature of the point of the point and therefore is called centripetal force.If there are several forces on the material point at the same time
, then its acceleration. Consequently, each of the forces that simultaneously act on the material point tells her the same acceleration as if there were no other forces (principle of independence of the strength).Differential equation of motion of the material point called equation
In the projections on the axis of the rectangular Cartesian coordinate system, this equation is
, ,where x, y and z are the coordinates of a moving point.
Third Law Newton. Movement of the center of mass.
The mechanical action of the bodies is manifested in the form of their interaction. This says the third Newton law: Two material points act on each other with the forces that are numerically equal and directed in opposite directions along a straight line connecting these points.
- force acting on i.- yu Material Point k.- y, a - force acting on the K-y material point by the i-th, then, according to the third Newton's law, attached to different material points and can and can be mutually balance only in cases where these points belong to the same absolutely solid Body.The third Newton law is a significant addition to the first and second laws. It allows you to move from the dynamics of a separate material point to the dynamics of an arbitrary mechanical system (system of material points). From the third law of Newton, it follows that in any mechanical system the geometric sum of all internal forces is zero: where
- the resulting external forces attached to i.Material point.From the second and third laws of Newton, it follows that the first time derivative t.from impulse p.the mechanical system is equal to the main vector of all external forces attached to the system,
.This equation expresses the law of changing the system of the system.
The reason for changing the speed of the body movement is always its interaction with other bodies.
After turning off the engine, the car gradually slows down its movement and stops. The main reason
changes in the velocity of the car - the interaction of its wheels with the road surface.
Motionlessly lying on Earth, the ball never comes in motion. The speed of the ball changes only as a result of the action on it of other bodies, such as football player's legs.
Constancy of the relationship of acceleration modules.
When two bodies interact, the speeds and the first and second body are always changed, i.e. both bodies acquire acceleration. The acceleration modules of two interactive bodies may be different, but their ratio is constant for any interactions:
Inertness tel.
The constancy of the relationship of the two-bodies acceleration modules with any interactions shows that the bodies have some property on which their acceleration depends during interactions with other bodies. The acceleration of the body is equal to the ratio of changes in its speed by the time for which this change occurred:
Since the time of action of the bodies is equally equally, the change in speed is greater from that body that acquires greater acceleration.
The smaller the body speed changes when interacting with other bodies, the closer its movement to a uniform rectilinear inertia movement. Such a body is called more inert.

All bodies have inertia properties. It is that to change body velocity when it interacts with any other bodies, it takes some time.
The manifestation of the properties of inertia bodies can be observed in the following experience. On a thin thread, hang a metal cylinder (Fig. 20, a), we will give below the same thread from below. Experience shows that with a gradual stretch of the lower thread, the upper thread is broken (Fig. 20, b). If you sharply pull behind the bottom thread, then the upper thread remains the whole, and the lower thread is broken (Fig. 20, B). In this case, the inertness of the cylinder affects, which does not have time in a short time it is enough to change its speed and make a noticeable move, sufficient to break the upper thread.
Body mass.
The body property, on which its acceleration depends when interacting with other bodies is called inertia. Quantitative measure of body inertness is body weight. The larger the body has the body, the less acceleration it receives when interacting.
Therefore, physics adopted that the ratio of mass interacting bodies is equal to the reverse relationship of the acceleration modules:
For a unit of mass in the international system, a mass of a special standard made from platinum and iridium alloy is adopted. The mass of this reference is called a kilogram (kg).
The mass of any body can be found by implementing the interaction of this body with a reference mass.
By determining the concept of mass, the ratio of mass of interacting bodies is equal to the reverse relationship of their acceleration modules (5.2). Measuring body acceleration and reference modules, you can find a body weight ratio to the bulk of the standard
The ratio of body weight to the mass of the standard is equal to the ratio of the ethodal acceleration module. To the body acceleration module when they interact.
The body weight can be expressed through the mass of the standard:
![]()
The body weight is a physical quantity characterizing its inertness.
Mass measurement.
To measure the masses of the body in science, technology and everyday practice, a method for comparing body weight with a weighing of the standard is rare by determining the accelerations of bodies when they interact. Typically used a method of comparing masses of bodies using scales.
When weighing, the ability of all bodies to interact with the Earth is used to determine the masses. Experiments have shown that the bodies with the same mass are equally attracted to the Earth. Equality of attraction of bodies to the ground can be, for example, to establish an equal stretching of the spring with alternately hanging to her bodies with the same masses.
Physics
Body mass
Interaction tel. The reason for changing the speed of the body is always its interaction with other bodies.Constancy of the relationship of acceleration modules. The interaction of two bodies always change the speeds and the first, and the second body, i.e. Both bodies acquire acceleration. The acceleration modules of two interactive bodies may be different, but their ratio is constant for any interactions:
Inertness tel.The constancy of the relationship of the two-bodies acceleration modules with any interactions shows that the bodies have some property on which their acceleration depends during interactions with other bodies.The smaller the body speed changes when interacting with other bodies, the closer its movement to a uniform rectilinear inertia movement. Such a body is called more inert.
All bodies have inertia properties. It is that to change the body velocity when it interacts with other bodies, it takes some time.
Body mass. The body property, on which its acceleration depends when interacting with other bodies, is called inertia. Quantitative measure of inertness is the mass of the body. The larger the body has the body, the less acceleration it receives when interacting.
Therefore, in physics it is customary that the ratio of mass of interacting bodies is equal to the reverse relationship of acceleration modules:
m 1 / M 2 \u003d A 2 / A 1 (5.2)The body weight is a physical quantity characterizing its inertness.
Density of substance. Wealth ratio m. bodies to his volume V. Called density of matter:
The density is expressed in kilograms per cubic meter, Unit of density is 1 kg / m 3.
Copyright © 2005-2013 Xenoid V2.0
Use of site materials is possible provided to specify an active link