1 ... When the wheel rotates, it has an angular velocity of 10 π glad / s. After braking, in a minute its speed decreased to 6 π glad / s. Find the angular acceleration of the wheel.
2 ... The flywheel began to rotate uniformly and in 10 s reached an angular velocity of 10 π glad / s. Determine the angular acceleration of the flywheel.
3 ... Specify the direction of tangential acceleration in points A, B, C, D when moving in a circle clockwise (Fig. 1), if:
a) if the speed increases;
b) decreases.
4 ... Determine the tangential acceleration of a wheel with a radius of 30 cm if it starts to brake with an angular acceleration of 0.2 rad / s 2.
5 ... Determine the angular acceleration of the motor shaft with a radius of 0.5 cm if its tangential acceleration is 1 cm / s 2.
6 ... Compare the formulas describing uniformly accelerated motion in a straight line and in a circle, and, using the method of analogy, fill in the table.
| № | Quantities and formulas | Equally accelerated movement in a straight line (linear quantities) | Equally accelerated movement in a circle (angular values) |
|---|---|---|---|
| 1 | Initial speed | υ 0 | |
| 2 | Final speed | υ | |
| 3 | Moving | Δ r | |
| 4 | Acceleration | a | |
| 5 | Formula for calculating acceleration | \ (~ a_x = \ frac (\ upsilon_x - \ upsilon_ (0x)) (t) \) | |
| 6 | Formula for calculating speed. | \ (~ \ upsilon_x = \ upsilon_ (0x) + a_x t \) | |
| 7 | Displacement formulas | \ (~ \ Delta r_x = \ upsilon_ (0x) t + \ frac (a_x t ^ 2) (2) \); \ (~ \ Delta r_x = \ upsilon_x t - \ frac (a_x t ^ 2) (2) \); \ (~ \ Delta r_x = \ frac (\ upsilon_x + \ upsilon_ (0x)) (2) \ cdot t \); \ (~ \ Delta r_x = \ frac (\ upsilon ^ 2_x - \ upsilon ^ 2_ (0x)) (2 a_x) \); |
7 ... The flywheel began to rotate uniformly and after 10 s it began to rotate with a period of 0.2 s. Define:
b) the angular movement that he will make during this time.
8 ... The flywheel, rotating at a frequency of 2 Hz, stops within 1.5 minutes. Considering the movement of the flywheel to be equally retarded, determine:
a) angular acceleration of the flywheel;
b) angular movement of the flywheel to a complete stop.
9 ... The disc rotates with an angular acceleration of 2 rad / s 2. Determine the angular displacement of the disc when the rotational speed changes from 4 Hz to 1.5 Hz?
10 ... The wheel, rotating equally slowly, when braking, reduced its frequency in 1 minute from 5 Hz to 3 Hz. Find the angular movement that the wheel made during the braking.
Level C
1 ... The flywheel starts rotating at uniform acceleration from rest and makes 3600 revolutions in the first 2 minutes. Find the angular acceleration of the flywheel.
2 ... The rotor of the electric motor starts to rotate from a state of rest at a uniform acceleration and makes 25 revolutions in the first 5 s. Calculate the angular velocity of the rotor at the end of the fifth second.
3 ... The propeller of the aircraft rotates at a frequency of 20 Hz. At some point in time, the motor is turned off. After 80 revolutions, the propeller stops. How much time has elapsed from the moment the motor was turned off to stop, if the rotation of the propeller is considered uniformly slowed down?
4 ... The wheel, rotating uniformly accelerated, reached an angular velocity of 20 rad / s 10 revolutions after the start of rotation. Find the angular acceleration of the wheel.
5 ... The material point moves in a circle. When the centripetal acceleration of a point becomes equal to 3.2 m / s 2, the angle between the vector of full and centripetal accelerations is 60 °. Find the tangential acceleration of a point for this point in time.
6 ... The point moves along a curve with a constant tangential acceleration of 0.5 m / s 2. Determine the total acceleration of a point on a curve segment with a radius of curvature of 3 m at a time when the linear velocity is 2 m / s.
7 ... A small body begins to move in a circle with a radius of 30 m with a tangential acceleration constant in magnitude of 5 m / s 2. Find the total acceleration of the body 3 s after the start of the movement.
8 ... A disk with a radius of 10 cm, which is at rest, began to rotate with a constant angular acceleration of 0.5 rad / s 2. Find the total acceleration of points on the circumference of the disk at the end of the second second after the start of rotation.
9 ... The angle of rotation of a wheel with a radius of 0.1 m changes according to the law φ =π t... Find the angular and linear velocities, centripetal and tangential accelerations of the points of the wheel rim.
10 ... The wheel turns according to the law φ = 5t – t 2. Find at the end of the first second of rotation the angular speed of the wheel, as well as the linear speed and total acceleration of the points lying on the rim of the wheel. Wheel radius 20 cm.
Themes of the Unified State Exam codifier: movement in a circle with constant absolute speed, centripetal acceleration.
Uniform circular motion is a fairly simple example of a motion with a time-dependent acceleration vector.
Let the point rotate around a circle of radius. The speed of the point is constant in absolute value and equal to. The speed is called linear velocity points.
Period of circulation - this is the time of one complete revolution. For the period, we have an obvious formula:
. (1)
Call frequency is the reciprocal of the period:
The frequency shows how many full revolutions the point makes per second. The frequency is measured in rev / s (revolutions per second).
For example, let. This means that the point completes one complete
turnover. In this case, the frequency is equal to: rev / s; the point makes 10 full revolutions per second.
Angular velocity.
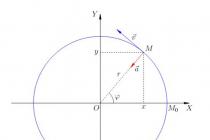
Consider the uniform rotation of a point in a Cartesian coordinate system. Place the origin at the center of the circle (Fig. 1).
 |
| Rice. 1. Uniform circular motion |
Let be the initial position of the point; in other words, at the point had coordinates. Let the point turn at an angle over time and take a position.
The ratio of the angle of rotation to time is called angular velocity point rotation:
. (2)
Angle is usually measured in radians, so angular velocity is measured in rad / s. In a time equal to the period of rotation, the point is rotated by an angle. That's why
. (3)
Comparing formulas (1) and (3), we obtain the relationship between the linear and angular velocities:
. (4)
The law of motion.
Let us now find the dependence of the coordinates of the rotating point on time. We see from Fig. 1 that
But from formula (2) we have:. Hence,
. (5)
Formulas (5) are the solution to the main problem of mechanics for the uniform movement of a point along a circle.
Centripetal acceleration.
Now we are interested in the acceleration of the rotating point. It can be found by twice differentiating relations (5):
Taking into account formulas (5), we have:
(6)
The resulting formulas (6) can be written in the form of one vector equality:
(7)
where is the radius vector of the rotating point.
We see that the acceleration vector is directed opposite to the radius vector, ie towards the center of the circle (see Fig. 1). Therefore, the acceleration of a point uniformly moving along a circle is called centripetal.
In addition, from formula (7) we obtain an expression for the modulus of centripetal acceleration:
(8)
Let us express the angular velocity from (4)
and substitute in (8). Let's get one more formula for centripetal acceleration.
a t = dv / dt = R.dw / dt = Re; (3.88).
a n = v 2 / R = w 2 R; (3.89).
a 2 = a t 2 + a n 2 = (dv / dt) 2 + (v 2 / R) 2 = R (e 2 + w 2). (3.90).
When a solid body rotates around a fixed axis, all points of the body move in circles with centers located on the axis of rotation. Linear values for points of a rotating solid body are associated with angular ones, because all formulas of these ratios will include the radius of rotation of the point.
The relationship between linear and angular values is expressed by the following formulas: s = Rj. (3.91).
v = Rw, (3.92).
a t = Re, (3.93).
a n = Rw 2. (3.94).
With uniformly accelerated motion in a circle, all types of accelerations are different from zero, only a t = const. (3.95). w = w 0 + et; (3.96).
j = j 0 + w 0 t + (et 2) / 2. (3.97).
For a particular case of curvilinear movement - movement along a circle of radius R, angular characteristics of motion are related to linear characteristics quite simply: Dj = Ds / R; (3.98).
w = dj / dt = v / R; (3.99).
e = dw / dt = d 2 j / dt 2 = a / R. (3.100).
There is an analogy between the movement of a solid body around a fixed axis and the movement of a separate material point (translational movement). Coordinate corresponds to angle, linear velocity - angular velocity, linear (tangential) acceleration - angular acceleration. Vector dφ is called the axial vector, while the displacement vector ∆r is a polar vector (this also includes velocity and acceleration vectors). A polar vector has a point of application (pole), and an axial vector has only length and direction (along the axis), but no point of application.
z: \ Program Files \ Physicon \ Open Physics 2.5 part 2 \ design \ images \ Fwd_h.gifz: \ Program Files \ Physicon \ Open Physics 2.5 part 2 \ design \ images \ Bwd_h.gifz: \ Program Files \ Physicon \ Open Physics 2.5 part 1 \ design \ images \ Fwd_h.gifz: \ Program Files \ Physicon \ Open Physics 2.5 part 1 \ design \ images \ Bwd_h.gif z: \ Program Files \ Physicon \ Open Physics 2.5 part 2 \ design \ images \ Fwd_h.gifz: \ Program Files \ Physicon \ Open Physics 2.5 part 2 \ design \ images \ Bwd_h.gif Lecture 4.
DYNAMICS OF A MATERIAL POINT.
The branch of mechanics that studies the laws of interaction of bodies is called dynamics. The reason for the movement of bodies and changes in its nature over time is the interaction of bodies . Interactions occur in space and therefore use the concept of a force field
Force, as a quantitative characteristic, is a measure of the intensity of the interaction of bodies. In mechanics, a force is a vector: it is set by the magnitude (modulus), direction of action (vector) and the point of application.
In physics, four types of interactions (forces) are distinguished:
1) gravitational;
2) electromagnetic;
3) strong (between elementary particles);
Weak (with transformations of elementary particles).
All mechanical forces are divided into conservative and non-conservative. Forces are called conservative, the work of which does not depend on the path, but is determined only by the coordinates of the points of the initial and final positions of the application of forces.
In mechanics, the principle of independence of forces operates: if several forces act simultaneously on a material point,
then each of these forces imparts acceleration to the material point, according to Newton's second law, as if there were no other forces. Force is characterized by a numerical value, direction and point of application and is a measure of the mechanical effect on the body.
NEWTON'S LAWS.
Newton's first law.
Any body is in a state of rest or uniform rectilinear motion if the resultant of all forces acting on this body is zero. The body's desire to maintain a state of rest or uniform rectilinear movement is called inertia.
Body mass is a physical quantity that is one of the main characteristics of matter, which determines its inertial (inertial mass) and gravitational (gravitational mass) properties.
Inertia the property of bodies to resist when trying to set it in motion or change the magnitude or direction of its speed is called. The resultant of all the forces acting on the body is the vector sum of all the forces acting on the body,
F res. = SF i. = 0. (4.1).
z: \ Program Files \ Physicon \ Open Physics 2.5 part 1 \ design \ images \ Fwd_h.gifz: \ Program Files \ Physicon \ Open Physics 2.5 part 1 \ design \ images \ Bwd_h.gif In system SI body weight is measured in kilograms (kg).
Newton's second law.
In Newton's second law a connection is established between the impact on the body - the force and the reaction to the impact, which manifests itself in a change in speed, i.e. in acceleration.
The acceleration with which the body moves is directly proportional to the resulting force acting on the body and inversely proportional to the body's mass.
F res. = am = m (dv / dt) = d (mv) / dt = dp / dt. (4.2).
V SI a unit of force is a force that imparts a mass to a body 1 kg acceleration 1 m / s 2. and called Newton (N).
Newton's third law.
The forces with which the bodies act on each other are equal in magnitude and opposite in direction, but never counterbalance each other, since they are applied to different bodies, although they have the same nature.
F 12 = - F 21. (4.3).
Force F 12, with which the first body acts on the second, is equal in magnitude to the force F 21, with which the second body acts on the first, but is opposite to it in direction. z: \ Program Files \ Physicon \ Open Physics 2.5 part 1 \ design \ images \ Fwd_h.gifz: \ Program Files \ Physicon \ Open Physics 2.5 part 1 \ design \ images \ Bwd_h.gifz: \ Program Files \ Physicon \ Open Physics 2.5 part 1 \ design \ images \ Fwd_h.gifz: \ Program Files \ Physicon \ Open Physics 2.5 part 1 \ design \ images \ Bwd_h.gif Newton's third law allows the transition from the dynamics of an individual material point to the dynamics of a system of material points. The collection of material points, considered as a whole, is called a mechanical system.
POINTS OF APPLICATION OF FORCES.
The acting force always causes a reaction force equal in magnitude and opposite in direction, then, consequently, their resultant must be equal to zero and bodies cannot acquire acceleration at all. Newton's second law speaks of acceleration under the action of forces applied to a body. Zero acceleration means that the sum of the forces applied to one body is equal to zero. Newton's third law says about the equality of forces applied to different bodies. Only one force acts on each of the two interacting bodies. Newton's third law allows the transition from the dynamics of an individual material point to the dynamics of a system of material points. For a system of points, the interaction is reduced to the forces of pair interaction. The collection of material points, considered as a whole, is called a mechanical system. The forces of interaction within a mechanical system are called internal. The forces with which the system is acted upon by external bodies are external.
FRICTION FORCES.
Friction z: \ Program Files \ Physicon \ Open Physics 2.5 part 1 \ design \ images \ Fwd_h.gifz: \ Program Files \ Physicon \ Open Physics 2.5 part 1 \ design \ images \ Bwd_h.gifz: \ Program Files \ Physicon \ Open Physics 2.5 part 1 \ design \ images \ Fwd_h.gifz: \ Program Files \ Physicon \ Open Physics 2.5 part 1 \ design \ images \ Bwd_h.gifz: \ Program Files \ Physicon \ Open Physics 2.5 part 1 \ design \ images \ Fwd_h .gifz: \ Program Files \ Physicon \ Open Physics 2.5 part 1 \ design \ images \ Bwd_h.gifz: \ Program Files \ Physicon \ Open Physics 2.5 part 1 \ design \ images \ Fwd_h.gifz: \ Program Files \ Physicon \ Open Physics 2.5 part 1 \ design \ images \ Bwd_h.gifz: \ Program Files \ Physicon \ Open Physics 2.5 part 1 \ design \ images \ Fwd_h.gifz: \ Program Files \ Physicon \ Open Physics 2.5 part 1 \ design \ images \ Bwd_h .gif occurs when two bodies touch. Friction forces, like elastic forces, have electromagnetic nature. They arise from interactions between atoms and molecules. Forces of dry friction are the forces that arise when two solids come into contact. They are always directed tangentially to touching surfaces. If the bodies are motionless relative to each other, then we have friction at rest, and if they move relative to the other, then, depending on the nature of their movement, we observe sliding, rolling or spinning friction. Force static friction always equal in magnitude to the external force and directed in the opposite direction. The static friction force cannot exceed a certain maximum value (F Tr.) Max.
If the external force is greater (F Tr.) Max. , relative slippage occurs. The frictional force in this case is called the sliding friction force. The sliding friction force is proportional to the force of normal body pressure on the support, and the reaction force of the support N:
F Tr. = (F Tr.) Max. = μN. (4.4)

…………………………………………………………………………………….
Rice. 22.
Aspect ratio μ called the coefficient of sliding friction. Friction coefficient μ - dimensionless quantity. It depends on the materials of the contacting bodies and on the quality of the surfaces. Meaning m varies from 1 to 0.001. Surface atoms have fewer neighbors with which to interact. When sliding, these contacts are constantly updated, there is a continuous exchange of ties between pairs of atoms of two bodies. Rolling friction occurs between a spherical or cylindrical body and a solid surface on which it rolls (rolling friction is always noticeably less than sliding friction). Rolling friction is also the result of the exchange of atomic-molecular bonds. When the bodies slide, the links on the contact exchange simultaneously, those. all at once.
And when rolling it happens consistently and in small portions.
Rolling friction force obeys the same experimental law as sliding friction:
F tr.kach = m quality (N / R) (4.5).
It is proportional to the strength of the normal support reaction. N(i.e. downforce), is inversely proportional to the radius of the wheel and is approximately independent of the speed of movement. NS When rolling, the rate of exchange of surface bonds is very low.
Friction can be external and internal. External friction is the friction that occurs in the plane of contact between two contacting bodies during their relative displacement.
When a rigid body moves in liquid or gas it is acted upon by a force that prevents movement. At low speeds resistance force proportional to the first degree of body speed:
F tr. = - k 1 v, (4.6)
at large - proportional to the square of the speed:
F tr. = - k 2 v. (4.7).
Resistance Coefficients k 1 and k 2, as well as the region of velocities in which the transition from linear to quadratic law is carried out, to a large extent depend on the shape and size of the body, the direction of its movement, the state of the body surface and on the properties of the environment.
1.Smooth circular motion
2. Angular speed of rotary movement.
3. Period of rotation.
4.Rotation frequency.
5. Connection of linear velocity with angular velocity.
6. Centripetal acceleration.
7. Equally variable movement in a circle.
8. Angular acceleration in uniform motion around a circle.
9.Tangential acceleration.
10. The law of uniformly accelerated movement in a circle.
11. Average angular velocity in uniformly accelerated motion around a circle.
12. Formulas that establish the relationship between angular velocity, angular acceleration and the angle of rotation in uniformly accelerated motion around a circle.
1.Uniform circular motion- movement, in which a material point for equal intervals of time passes equal segments of the arc of a circle, i.e. the point moves in a circle with a constant absolute speed. In this case, the speed is equal to the ratio of the circular arc traversed by the point to the time of movement, i.e.
and is called the linear speed of movement in a circle.
As in curvilinear motion, the velocity vector is directed tangentially to the circle in the direction of motion (Fig. 25).
2. Angular Velocity in Uniform Circular Motion- the ratio of the angle of rotation of the radius to the time of rotation:
In a uniform motion around a circle, the angular velocity is constant. In SI, angular velocity is measured in (rad / s). One radian - rad is the central angle that subtends an arc of a circle with a length equal to the radius. The total angle contains radians, i.e. in one revolution, the radius is rotated by an angle of radians.
3. Rotation period- the time interval T, during which the material point makes one complete revolution. In the SI system, the period is measured in seconds.
4. Rotation frequency- the number of revolutions made in one second. In SI units, frequency is measured in hertz (1Hz = 1). One hertz is the frequency at which one revolution is made in one second. It is easy to figure out that
If in time t the point makes n revolutions around the circle then.
Knowing the period and frequency of rotation, the angular velocity can be calculated by the formula:
5 Relationship between linear velocity and angular velocity... The length of an arc of a circle is where is the central angle, expressed in radians, that subtends the arc to the radius of the circle. Now we write the linear velocity in the form
It is often convenient to use the formulas: or The angular velocity is often referred to as the cyclic frequency, and the frequency as the linear frequency.
6. Centripetal acceleration... In uniform motion around a circle, the speed module remains unchanged, and its direction is continuously changing (Fig. 26). This means that a body moving uniformly around a circle experiences acceleration, which is directed towards the center and is called centripetal acceleration.
Suppose that a path equal to an arc of a circle has passed over a period of time. Move the vector, leaving it parallel to itself, so that its beginning coincides with the beginning of the vector at point B. The modulus of the velocity change is equal, and the modulus of centripetal acceleration is
In Fig. 26 the triangles AOB and ICE are isosceles and the angles at the vertices O and B are equal, as are the angles with mutually perpendicular sides AO and OB This means that triangles AOB and ICE are similar. Therefore, if that is, the time interval takes arbitrarily small values, then the arc can be approximately considered equal to the chord AB, i.e. ... Therefore, we can write Considering that VD =, OA = R we obtain Multiplying both sides of the last equality by, we will also obtain an expression for the centripetal acceleration modulus in uniform motion along a circle:. Considering that we get two commonly used formulas:
So, in a uniform motion around a circle, the centripetal acceleration is constant in absolute value.
It is easy to figure out that in the limit at, the angle. This means that the angles at the base of the DS of the ICE triangle tend to the value, and the velocity vector becomes perpendicular to the velocity vector, i.e. directed along the radius to the center of the circle.
7. Equally variable circular motion- movement in a circle, in which the angular velocity changes by the same amount over equal time intervals.
8. Angular acceleration in an equally variable motion along a circle- the ratio of the change in angular velocity to the time interval during which this change occurred, i.e.
where the initial value of the angular velocity, the final value of the angular velocity, the angular acceleration, in the SI system is measured in. From the last equality, we obtain formulas for calculating the angular velocity
And if .
Multiplying both sides of these equalities by and taking into account that, is the tangential acceleration, i.e. acceleration directed tangentially to the circle, we obtain the formulas for calculating the linear velocity:
And if .
9. Tangential acceleration is numerically equal to the change in speed per unit of time and is directed along the tangent to the circle. If> 0,> 0, then the motion is uniformly accelerated. If<0 и <0 – движение.
10. The law of uniformly accelerated motion in a circle... The path traversed in a circle during the time in uniformly accelerated motion is calculated by the formula:
Substituting here, canceling by, we obtain the law of uniformly accelerated motion in a circle:
Or if.
If the movement is equally slow, i.e.<0, то
11.Full acceleration in uniformly accelerated circular motion... In uniformly accelerated motion along a circle, the centripetal acceleration increases with time, because the tangential acceleration increases the linear speed. Very often, centripetal acceleration is called normal and denoted as. Since the full acceleration at the moment is determined by the Pythagorean theorem (Fig. 27).
12. Average angular velocity in uniformly accelerated motion in a circle... The average linear speed in uniformly accelerated motion in a circle is equal to. Substituting here and and reducing by we get
If, then.
12. Formulas establishing the relationship between angular velocity, angular acceleration and the angle of rotation in uniformly accelerated motion around a circle.
Substituting into the formula the quantities,,,,
and canceling by, we get
Lecture - 4. Dynamics.
1. Dynamics
2. Interaction of bodies.
3. Inertia. The principle of inertia.
4. Newton's first law.
5. Free material point.
6. Inertial frame of reference.
7. Non-inertial frame of reference.
8. Galileo's principle of relativity.
9. Transformations of Galileo.
11. Consolidation of forces.
13. Density of substances.
14. Center of mass.
15. Newton's second law.
16. Unit of measure of force.
17. Newton's third law
1. Dynamics there is a section of mechanics that studies mechanical movement, depending on the forces that cause a change in this movement.
2.Body interactions... Bodies can interact, both in direct contact, and at a distance through a special type of matter called a physical field.
For example, all bodies are attracted to each other and this attraction is carried out through the gravitational field, and the forces of attraction are called gravitational.
Bodies that carry an electric charge interact through an electric field. Electric currents interact through a magnetic field. These forces are called electromagnetic.
Elementary particles interact through nuclear fields and these forces are called nuclear.
3.Inertia... In the IV century. BC NS. the Greek philosopher Aristotle argued that the cause of the movement of a body is a force acting from another body or bodies. At the same time, according to motion, according to Aristotle, a constant force imparts a constant speed to the body, and with the cessation of the action of the force, the movement stops.
In the 16th century. Italian physicist Galileo Galilei, conducting experiments with bodies rolling along an inclined plane and with falling bodies, showed that a constant force (in this case, the weight of the body) imparts acceleration to the body.
So, on the basis of experiments, Galileo showed that force is the cause of the acceleration of bodies. Let us give Galileo's reasoning. Let a very smooth ball roll on a smooth horizontal plane. If nothing interferes with the ball, then it can roll as long as you like. If a thin layer of sand is poured on the path of the ball, then it will stop very soon, because it was acted upon by the frictional force of the sand.
So Galileo came to the formulation of the principle of inertia, according to which a material body retains a state of rest or uniform rectilinear motion, if external forces do not act on it. Often this property of matter is called inertia, and the movement of a body without external influences is called inertial motion.
4. Newton's first law... In 1687, on the basis of Galileo's principle of inertia, Newton formulated the first law of dynamics - Newton's first law:
A material point (body) is in a state of rest or uniform rectilinear motion, if other bodies do not act on it, or the forces acting from other bodies are balanced, i.e. compensated.
5.Free material point- a material point on which other bodies do not act. Sometimes they say - an isolated material point.
6. Inertial frame of reference (ISO)- a frame of reference relative to which an isolated material point moves rectilinearly and uniformly, or is at rest.
Any frame of reference that moves uniformly and rectilinearly relative to the IFR is inertial,
Let's give one more formulation of Newton's first law: There are frames of reference relative to which a free material point moves rectilinearly and uniformly, or is at rest. Such frames of reference are called inertial. Often Newton's first law is called the law of inertia.
Newton's first law can also be formulated like this: any material body resists a change in its speed. This property of matter is called inertia.
We are faced with the manifestation of this law every day in urban transport. When the bus picks up speed sharply, we are pressed against the back of the seat. When the bus slows down, then our body skids in the direction of the bus.
7. Non-inertial frame of reference - a frame of reference that moves unevenly relative to the IFR.
A body that is at rest or in uniform rectilinear motion relative to IFR. Moves unevenly relative to the non-inertial frame of reference.
Any rotating frame of reference is a non-inertial frame of reference, since in this system, the body experiences centripetal acceleration.
There are no bodies in nature and technology that could serve as ISO. For example, the Earth rotates around its axis and any body on its surface experiences centripetal acceleration. However, for rather short periods of time, the frame of reference associated with the Earth's surface in some approximation can be considered IFR.
8.Galileo's principle of relativity. ISO can be a lot of salt. Therefore, the question arises: how do the same mechanical phenomena look in different IFRs? Is it possible, using mechanical phenomena, to detect the motion of the IF, in which they are observed?
The answer to these questions is given by the principle of relativity of classical mechanics, discovered by Galileo.
The meaning of the principle of relativity of classical mechanics lies in the statement: all mechanical phenomena proceed in exactly the same way in all inertial reference frames.
This principle can be formulated as follows: all the laws of classical mechanics are expressed by the same mathematical formulas. In other words, no mechanical experiments will help us to detect the motion of the IRS. This means that an attempt to detect the movement of the IRS is meaningless.
We encountered the manifestation of the principle of relativity while traveling on trains. At the moment when our train is at the station, and the train standing on the next track slowly starts moving, then in the first moments it seems to us that our train is moving. But it also happens the other way around, when our train is gradually picking up speed, it seems to us that the movement was started by a neighboring train.
In the given example, the principle of relativity manifests itself during small intervals of time. With an increase in speed, we begin to feel the jolts of the wagon rocking, that is, our frame of reference becomes non-inertial.
So, an attempt to detect the movement of ISO is meaningless. Therefore, it is absolutely indifferent which IRF is considered to be motionless and which one is to be considered as moving.
9. Galileo transformations... Let two IFRs and move relative to each other with speed. According to the principle of relativity, we can assume that the IFR K is motionless, and the IFR moves relatively with speed. For simplicity, let us assume that the corresponding coordinate axes of the systems and are parallel, and the axes and coincide. Let at the moment of the beginning of the systems coincide and the movement occurs along the axes and, i.e. (Fig. 28)
11. The addition of forces... If two forces are applied to the particle, then the resulting force is equal to their vector force, i.e. the diagonal of the parallelogram built on the vectors and (Fig. 29).
The same rule applies to the decomposition of a given force into two component forces. To do this, on the vector of a given force, as on a diagonal, a parallelogram is built, the sides of which coincide with the direction of the constituent forces applied to a given particle.
If several forces are applied to the particle, then the resultant is equal to the geometric sum of all forces:
12.Weight... Experience has shown that the ratio of the modulus of force to the modulus of acceleration, which this force imparts to the body, is a constant value for a given body and is called the mass of the body:
From the last equality it follows that the greater the mass of the body, the greater the force must be applied to change its speed. Consequently, the greater the mass of the body, the more inert it is, i.e. mass is a measure of the inertia of bodies. The mass thus determined is called the inert mass.
In SI, mass is measured in kilograms (kg). One kilogram is the mass of distilled water in a volume of one cubic decimeter taken at a temperature
13. Density of matter- the mass of a substance contained in a unit of volume or the ratio of body mass to its volume
Density is measured in SI (). Knowing the density of the body and its volume, you can calculate its mass by the formula. Knowing the density and mass of the body, its volume is calculated by the formula.
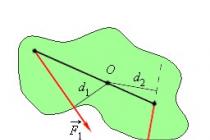
14.Center of mass- a point of the body, which has the property that if the direction of action of the force passes through this point, the body moves translationally. If the direction of action does not pass through the center of mass, then the body moves, while rotating around its center of mass
15. Newton's second law... In IFR, the sum of the forces acting on a body is equal to the product of the body's mass by the acceleration imparted to it by this force
16.Force unit... In SI, force is measured in newtons. One newton (n) is a force that acts on a body weighing one kilogram and imparts acceleration to it. That's why .
17. Newton's third law... The forces with which two bodies act on each other are equal in magnitude, opposite in direction and act along one straight line connecting these bodies.
Uniform circular motion Is the simplest example. For example, the end of the watch hand moves along the circle along the dial. The speed of movement of the body in a circle is called line speed.
With uniform motion of the body around the circumference, the modulus of the body's velocity does not change over time, that is, v = const, but only the direction of the velocity vector changes in this case (a r = 0), and the change in the velocity vector in the direction is characterized by a quantity called centripetal acceleration() a n or a CA. At each point, the centripetal acceleration vector is directed to the center of the circle along the radius.
The centripetal acceleration modulus is
a CA = v 2 / R
Where v is the linear speed, R is the radius of the circle

Rice. 1.22. The movement of the body in a circle.
When describing the movement of a body in a circle, it is used radius rotation angle- the angle φ, by which, in time t, the radius turns from the center of the circle to the point at which the moving body is at this moment. The angle of rotation is measured in radians. is equal to the angle between two radii of a circle, the length of the arc between which is equal to the radius of the circle (Fig. 1.23). That is, if l = R, then
1 radian = l / R
Because circumference is equal to
l = 2πR
360 о = 2πR / R = 2π rad.
Hence
1 glad. = 57.2958 o = 57 o 18 '
Angular velocity uniform movement of the body along the circumference is the value of ω, equal to the ratio of the angle of rotation of the radius φ to the time interval during which this rotation was made:
ω = φ / t
The unit of measure for angular velocity is radians per second [rad / s]. The linear velocity modulus is determined by the ratio of the length of the traversed path l to the time interval t:
v = l / t
Linear Velocity with uniform movement along a circle, it is directed tangentially at a given point of the circle. When a point moves, the length l of the circular arc traversed by the point is related to the angle of rotation φ by the expression
l = Rφ
where R is the radius of the circle.
Then, in the case of uniform motion of the point, the linear and angular velocities are related by the relation:
v = l / t = Rφ / t = Rω or v = Rω

Rice. 1.23. Radian.
Period of circulation- this is the period of time T, during which the body (point) makes one revolution around the circumference. Call frequency Is the reciprocal of the period of revolution - the number of revolutions per unit of time (per second). The frequency of the call is indicated by the letter n.
n = 1 / T
In one period, the angle of rotation φ of a point is 2π rad, therefore 2π = ωT, whence
T = 2π / ω
That is, the angular velocity is
ω = 2π / T = 2πn
Centripetal acceleration can be expressed in terms of the period T and the frequency of circulation n:
a CS = (4π 2 R) / T 2 = 4π 2 Rn 2